Simulaciones de brazos robóticos - áreas de trabajo de un brazo robótico
Applet 1: Brazo robótico bidimensional
Applet 2: Brazo robótico tridimensional - intuición sobre el área de trabajo
Applet 3: Independencia del orden de los segmentos rígidos sobre el área de trabajo
1 Contexto teórico de uso de los applets
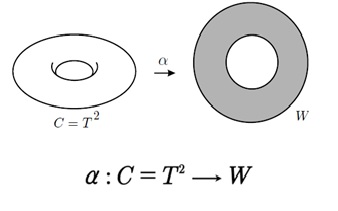
Hay tres conceptos importantes: 1) el espacio de configuración C, 2) el espacio de trabajo W y 3) el mapa de trabajo asociado α
El Espacio de configuración lo definimos como la variedad topológica donde “vive” el brazo robótico, entendido esto como el espacio que contiene el barrido de todos sus segmentos, articulaciones y extremos. Tiene la siguiente expresión:
![[size=100][size=150]Dicho espacio es un [color=#980000][b]toro bidimensional[/b][/color][/size][/size]](https://www.geogebra.org/resource/m53hdcj6/GmpgQj6NjoLHRNUS/material-m53hdcj6.png)
El espacio de trabajo, también conocido como espacio de alcance (reachability), es justamente el conjunto de puntos que, dentro del espacio de configuración, alcanza el extremo efector del brazo. Lo denominamos W.
Por último, el mapa de trabajo asociado, es la relación entre el espacio de configuración y el espacio de trabajo, todas estas consideraciones se hacen sobre el caso de un brazo robótico bidimensional.
El Applet 2 nos servirá para extender la intuición sobre estos conceptos al caso de tres dimensiones...
2 ¿Cuál es el problema que buscamos estudiar?
El problema que buscaremos analizar está planteado en los siguientes términos: bajo el modelo planteado, ¿cuáles son los puntos que pueden ser alcanzados por un n-brazo articulado mecánico?
Los applets de Geogebra tendrán la función de ampliar las opciones de intuición relacionadas a la demostración de dos sencillos teoremas de la robótica que apuntan en esta dirección.
3 Teoremas e imágenes correspondientes
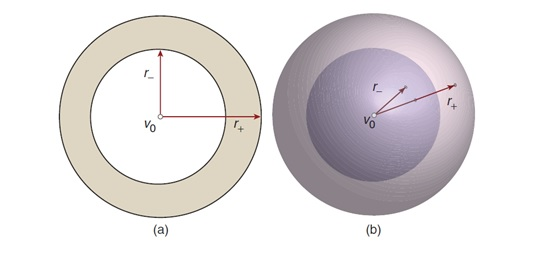
Teorema 1.1: La región de alcance de un n-brazo articulado es un anillo
Imagen, caso 2 dimensiones y 3 dimensiones...
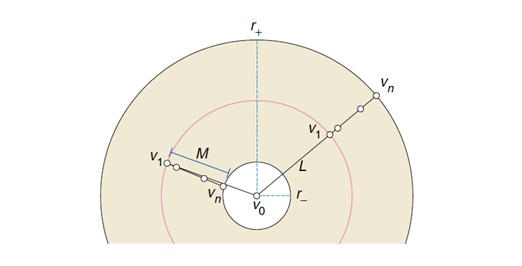
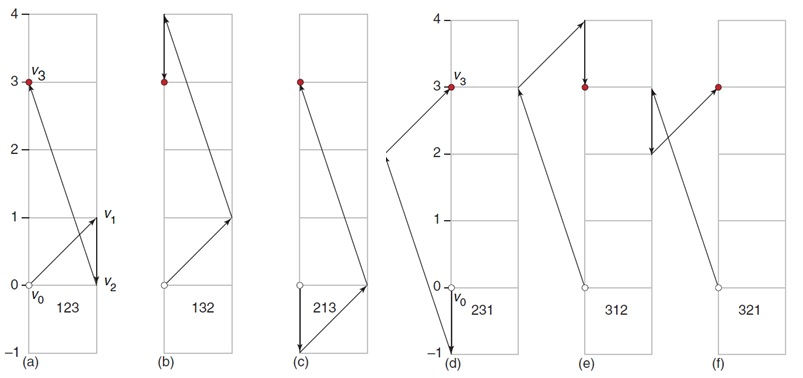
Lema 1.1: El área de alcance de un brazo robótico es independiente del orden de la longitud de los segmentos que lo conforman. Sólo depende de la longitud de dichos segmentos
Distintas formas de alcanzar un punto dentro del área de trabajo
Teorema 1.2: El radio exterior del anillo de alcance (reachability annulus) de un n-brazo articulado es:
![[center][/center]](https://www.geogebra.org/resource/dgmavt65/QPmv1nuABtgqfM2G/material-dgmavt65.png)
y el radio interno es:
![[center][/center]](https://www.geogebra.org/resource/szvkah3b/871fFiY4aQ6D2zSt/material-szvkah3b.png)
donde L es la longitud del mayor segmento rígido del n-brazo articulado, y M la suma de los restantes segmentos.
Para el caso de dos dimensiones...