Google Classroom
GeoGebra
GeoGebra Classroom
Bejelentkezés
Keres
Google Classroom
GeoGebra
GeoGebra Classroom
Áttekintés
MMT: Synthesis of Mechanisms
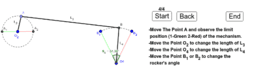
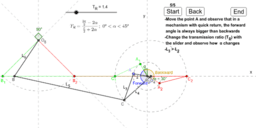
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
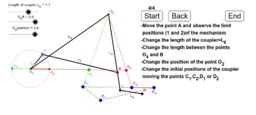
Synthesis of two angular positions with no Quick Return
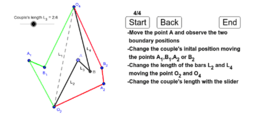
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
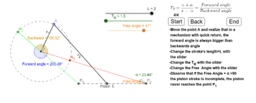
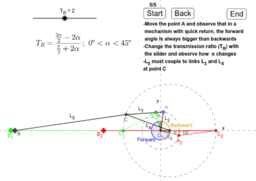
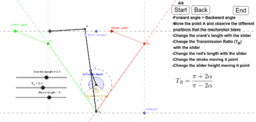
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
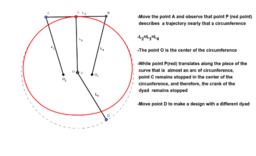
Single dwell with dyad
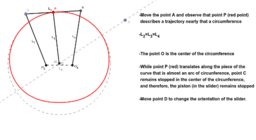
Single Dwell Mechanism with slider
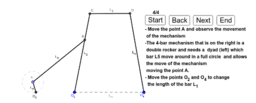
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Szerző:
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Következő
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Új anyagok
Nikmati Keunggulan Di Bandar Judi Terpercaya
Rectangular Cross Sections
bewijs stelling van Pythagoras
Exploring Number of Squares on the Diagonal of a Rectangle
Rotation in Cartesian Plane
Anyagok felfedezése
This is My amazing Circle Sheet
Def_o_Derivative
Indices 2
Reflected Triangles
The Complete Quadrilateral
Témák felfedezése
Négyszögek
Számok
Diagramok
Kúpszeletek
Tört