Kapitel
4ºESO. Funciones
Inhaltsverzeichnis
Rectas y parábolas
- La recta: Ecuación, pendiente y ángulo
- 1. Ejercitador de Funciones Lineales (Ecuación ->Recta)
- 2. Ejercitador de Funciones Lineales (Recta->Ecuación)
- Función Cuadrática (parábola)
- Ejemplos de Funciones Elementales
- Dibujar la parábola a partir del vértice y un punto.
- Hipérbolas Equiláteras
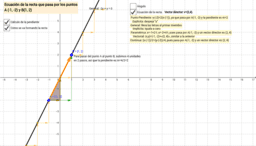
- Recta. Ecuación Explícita conocidos dos puntos
- Parábolas
- Ecuación de la Parábola
- Funciones lineales. Problemas
- Rectas. Elige la función correcta
- Parábolas. Elige la función correcta
- Hipérbolas Equiláteras. Elige la función correcta
Polinomios y Fracciones Algebraicas
- Representación de Polinomios, conocidos sus puntos críticos (elegirlos en el "eje x")
- Representar polinomios, conociendo sus puntos críticos (introducir coordenada "x")
- Representación de fracciones algebraicas usando Ceros y Polos
- Representación de Fracciones Algebraicas
- Dibujar funciones
- Máximos y Mínimos en gráficas de funciones
- Frac. Algebraicas. Elige la función correcta
Propiedades de las Funciones
- Domain and range
- Máximos y mínimos
- Polinomios con Eje de Simetría
- Polinomios con simetría central
- Funciones lineales con valores absolutos
- Funciones a trozos
- Monotonía y Continuidad
- Curvatura (convexa/cóncava) e Inflexión
- Signos y corte con los ejes
- Polinomios. Elige la función correcta
- Simetrías Par/Impar. Elige la función correcta
- Raíces. Elige la función correcta
- Valores Absolutos. Elige la función correcta
- Exponenciales y logaritmos. Elige la función correcta
- Elige la función correcta
- Elige la función correcta. Practica distintos tipos de función
Funciones Trigonométricas
Operaciones con funciones
- Composición de funciones
- Inversa de una función (método gráfico)
- Translation using vector notation
- Composition of two functions. La composició de funcions
- Composición de rotación y traslación
- Transformaciones de funciones: reflexión y estiramiento
- Transformaciones de funciones: Traslaciones
- Operaciones con funciones
Otros