Intersecting a line
Programming hints
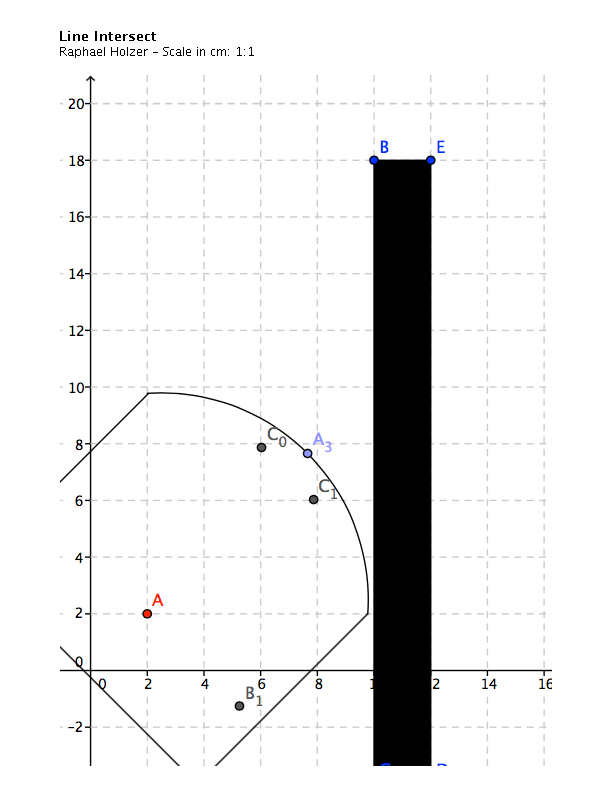
Place the robot at the starting position and monitor the sensors . Calculate the distance to the black line. From the time difference in the two signals, use trigonometry to calculate the angle under which the robot hits the black line. Program the robot to turn and continue perpendicular after the line.
Preview of the printed A4 sheet